

解析Valve的“Lighthouse”追蹤系統(tǒng)技術(shù)
頭部追蹤是VR頭顯非常重要的技術(shù)指標,最傳統(tǒng)的方法是使用慣性傳感器,但慣性傳感器只能追蹤頭部的轉(zhuǎn)動,要想追蹤頭部的位移,需引入光學系統(tǒng)。Valve的Lighthouse追蹤系統(tǒng)是目前較好的VR光學跟蹤方案。
Valve的Lighthouse基于一組傳感器,能監(jiān)測配套基站激光束的跟蹤系統(tǒng),為HTC Vive提供Room Scale房型虛擬現(xiàn)實體驗,通過VR頭顯和控制器追蹤定位空間。
Lighthouse追蹤技術(shù)
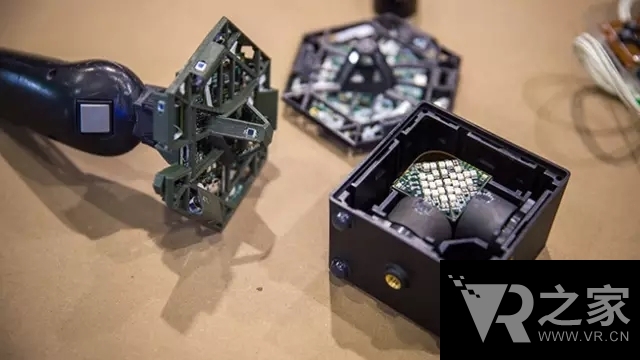
Lighthouse由兩個基站構(gòu)成,每個基站里有一個紅外LED陣列,兩個轉(zhuǎn)軸互相垂直的旋轉(zhuǎn)的紅外激光發(fā)射器。激光基站的工作原理是基于Lighthouse 的長期無漂移(drift-free )位置追蹤技術(shù)。每個Lighthouse基站包含兩束激光。一個是水平的激光(基站的坐標系統(tǒng))從下到上(位于基站前方)橫掃追蹤的數(shù)量;另一束激光是垂直的從左到右橫掃追蹤數(shù)量。兩束激光在各種的軸以3600 rpm速度旋轉(zhuǎn)。兩束激光在同一基站只能有一個激光扇面可以對整個定位空間進行掃描。
但是該定位追蹤準確嗎?Oliver Kreylos,計算機科學博士同時是加州大學戴維斯分校的一位VR研究員,有多年虛擬現(xiàn)實數(shù)據(jù)可視化研究經(jīng)驗,對Lighthouse追蹤系統(tǒng)進行了深度解析。
更多的基站意味著更加準確的追蹤
基站是Lighthouse追蹤系統(tǒng)的基礎(chǔ)。它使用水平和垂直激光交替掃描檢測HTC Vive頭顯和SteamVR控制器,同時頭顯和控制器里面的小型傳感器會檢測經(jīng)過的激光。然后系統(tǒng)巧妙地整合了所有的數(shù)據(jù)用來確定設(shè)備的轉(zhuǎn)動和3D空間的位置。每個設(shè)備中裝載的高速IMUs被用來協(xié)助定位追蹤。
Kreylos試圖測量系統(tǒng)的“抖動”,即完全靜止站立的測量物體(指頭顯)在測量時所產(chǎn)生的誤差。隨著時間的推移,通過3D空間的追蹤系統(tǒng)在每個位置的讀數(shù),他能夠測量每個軸上讀數(shù)的數(shù)量。

Kreylos通過兩個基站追蹤Vive頭顯發(fā)現(xiàn)系統(tǒng)的抖動誤差約為0.3mm,這意味著對于追蹤系統(tǒng)而言,頭顯似乎在空間領(lǐng)域中都會有0.3mm的誤差(盡管在現(xiàn)實中頭顯是完全靜止的)。
幸運的是,這個亞毫米級抖動誤差很小,以至于當我們戴著頭顯的時候是感受不到的。
有趣的是,Kreylos發(fā)現(xiàn)當只一個基站覆蓋的時候,抖動仍然為0.3mm,而當軸指向另一個基站的時,誤差會達到2.1mm。
這意味著兩個基站同時被檢測到的時候,Lighthouse可以更加精確地追蹤物體。未來Vive頭顯可能會添加傳感器為了在任何時候看到基站。
精確度和準確度
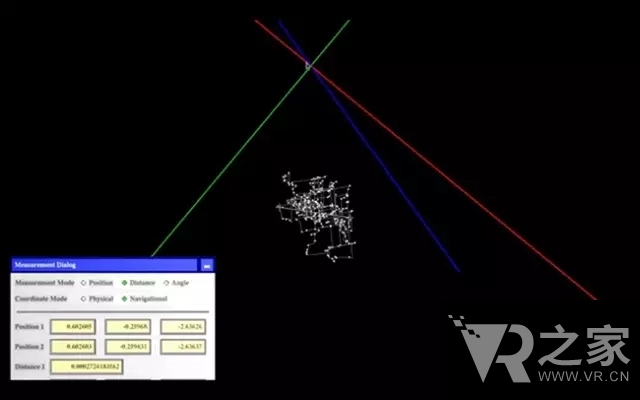
Kreylos試圖同時測量Lighthouse的精確度和準確度。他解釋精確度測量是“在空間中對同一個點多次測量的結(jié)果相似度”,準確度是指:“在空間中對一個點的測量和真實的點位置的相似度”。
正如所有好的科學家,Kreylos首先解釋了測量的方法:
我把一個36英寸的尺子放在地板上,位于追蹤空間的中心,然后用我附在其中一個追蹤控制器的小型探針針尖來標識出每1英寸的3D位置(位于控制器的本地坐標系的探針針尖位置,是對點進行重復測量的關(guān)鍵,這是源于一個簡單的校準程序)。接下來,我把每個三維點的測量結(jié)果與“理想”的三維點進行比較。這個理想的三維點是通過非線性點集的對準算法在一些任意坐標系中生成每一個點的理論位置。
綠色代表著理想的測量點,而紫色顯示了Lighthouse追蹤測量點。——Oliver Kreylos
基于這些測量,Kreylos預(yù)計,Lighthouse的精確度為RMS 1.5mm;準確度為RMS 1.9 mm。
盡管上圖測量中有一些失真,但Kreylos表示“(Lighthouse)整體的準確度非常好”,并進一步推斷,作為一個有實際意義的結(jié)果,因此,附加一個校準探針針尖的Lighthouse控制器,有可能作為一個大面積三維數(shù)字化儀來使用,預(yù)期精度約為2mm。
漂移校正

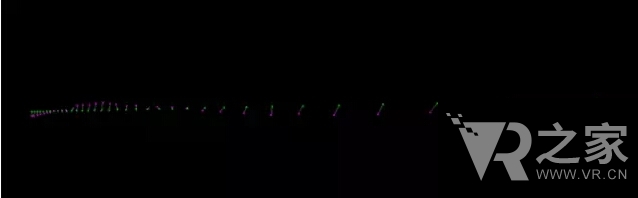
Kreylos同時檢查并解釋:當激光掃描每個軸的時候,Lighthouse系統(tǒng)校正的控制器的IMU的方式。
通過讓控制器圍繞著頭部進行高速轉(zhuǎn)動,并繪制測量數(shù)據(jù),Kreylos可以可視化漂移校正。
未經(jīng)授權(quán),禁止轉(zhuǎn)載,違者必將追究法律責任。
文章點評
相關(guān)閱讀
-
 Daydream不過是踏腳石,MR才是谷歌的真正目標
Daydream不過是踏腳石,MR才是谷歌的真正目標就在前幾天,我們剛剛報道了一則關(guān)于搜索巨頭谷歌砍掉了旗下實驗室中一個類似Oculus Rift的獨立式VR頭顯開發(fā)項目的傳聞。大家似乎都認為谷歌決定放棄高端VR領(lǐng)域并專注于移動VR平臺的建設(shè)了,然而,...
- 國內(nèi)首部VR互動電影《靈魂寄生》終于要來了
- 搞不懂AR與VR?谷歌的新頭顯教你區(qū)分
- 阿里巴巴的VR購物或許比我們想象的更早到來
- VR TOP人物對話:張悅聊隕石科技館的現(xiàn)在與未來
- “誅仙之父”曾戈回湘創(chuàng)辦VR企業(yè) 備受業(yè)界認可

